Inverse Kinematics for Surgical Robotics¶
Note
This feature is a work in progress (WIP) and will be available in future versions of Creator.
What is Inverse Kinematics?¶
Inverse kinematics refers to the procedure of determining the joint angles necessary to achieve a desired position and orientation of the end-effector in space. It is the mathematical process of working backward from the desired endpoint to calculate the desired configuration of each joint. This capability is vital for controlling robotic arms with precision and successfully perform their intended tasks.
Our solution¶
This module enables users to control robotic arms effortlessly by automatically solving the forward and inverse kinematics of the designated kinematic chain. Users can import their preferred robotic arm model and by following a simple configuration process, gain control over its movements.
The tasks mentioned earlier can be completed using our affiliated authoring tool, removing the necessity for coding, achieving a high-fidelity resemblance to robotic movement. Our authoring tool will equip developers with all the necessary information required to design the kinematics chain. Forward and inverse kinematics will be automatically managed and computed through Creator.
Demonstration of a 6 Degrees of Freedom (DoF) surgical robotic forcep.¶
Example: A VR Digital Twin of a Surgical Robotic System¶
A usage example can be seen in the pictures below. Using the Inverse Kinematics from Creator, the developers were able to create a VR Digital twin for a modern surgical robotic system.
The developers utilized our no-code authoring tool to create the inverse kinematic chain and configure the end-effector for both forceps. The algorithm handles all the necessary mathematical computations to achieve lifelike robotic movement.
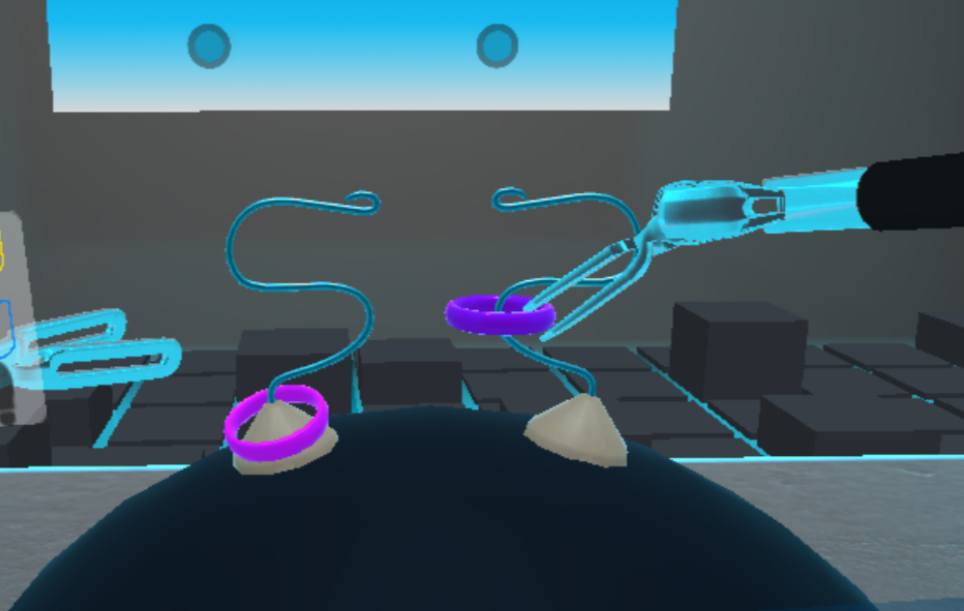
Demonstration of a VR Digital twin of a surgical robotic system.¶
Note
This module uses MathNet.Numerics under the MIT license https://licenses.nuget.org/MIT.
MIT License Copyright © 2002-2022 Math.NET
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the “Software”), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions: THE SOFTWARE IS PROVIDED “AS IS”, WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.”